This increase intake of charge allows faster acceleration of the motors which allowed more thrust. The end result was that the quadcopter flew.
But the quadcopter kept flipping over whenever it tried to take off. I wasn't sure if it was a hardware problem (the motors are damaged) or a software problem. So how I tested this was that I switch the different inputs of the wires of the motor ESCs that connect to the flight controller to see if the motors are damaged. If I got different outputs from the initial outputs I got from the program that means the motors are damaged. I got same output, which means it is a software coding problem.So I looked into the quadcopter software. I mainly use two different ones Clean flight and base flight.
 |
| Clean flight software allows the installation and configuration for quadcopter flight |
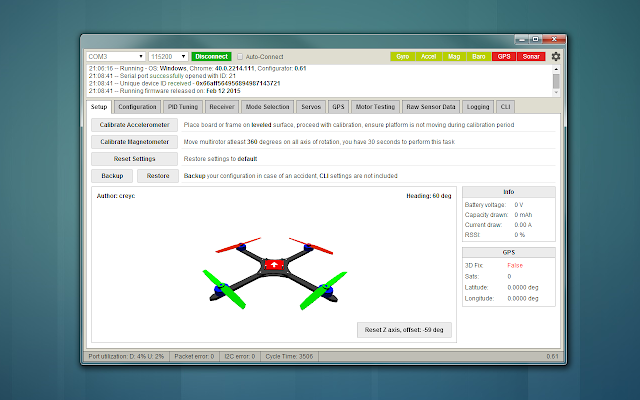 |
| Basically clean flight with a different GUI |
I realized when I used the receiver (controller) the motor throttle speed was different among all 4 motors.


I knew this was the source of the flipping over. After intensive research the trim (the sliding buttons) was responsible for the the unequal motor distribution.

The reason why is that the quadcopter was not at is neutral state, it was thinking it needed to compensate for the yaw, pitch, and roll variables thus accelerating and decelerating the motors thinking that was the stable state. I adjust all the yaw, roll, and pitch variables to the 1500 RC input (1500 is the RC input center value). After fixing the receiver, the qaudcopter flew.
However it failed the integrity test as it did not survive the numerous fail landings during our first flight (Flying a quadcopter is not easy at all).

I fixed many of the build flaws I had initially with the quadcopter:
1. Fixed the soldering job of the bullet connectors, as well the soldering job of the power distribution board.
2. Took all the tape of that secured the wires and exchange it with zip ties.
3. Tighten all the screws
4. inserted more screws
5 installed self stabilization program
 |
| Before |
 |
| After |
 |
| Before |
 |
| After |

I try to fly it again, but it flipped during take off and actually broke one of our propellers. I brought it back to test it. After a thorough investigation and crying, I found that it was auto stabilizing during the take off causing unequal distribution of motor output (motor 3 was accelerating while motor 2 decelerate causing to flip). This time it was not the trim problem but one the modes I added after the rebuild. When I flip the switch to the highest mode (3 modes) it would switch on the self stabilization mode as it was at the medium switch mode.
So at start the quad copter was acting it needed to stabilized it self. Should I also mention I had to switch to base flight because the clean flight software on my 2012 mac failed to register my receiver.
After checking it everything works I yet to test it yet. However it seems like the motors outputs are equally distribute which is good.
What I hope to accomplish for the other half of week 6 1/2 and week 7 (Spring break), is to start testing number of propellers. I have about a month left and my plan is to incorporate longer arm lengths and ducted propellers. I am in a time crunch right now. I didn't expect the quadcopter build to be so difficult.
What I learned:
1. Murphy's law is a pain in the butt
2. I enjoy the stress of everything going wrong because that's how engineering works. We build if it doesn't work, we build again. Welcome to the world of engineering.

No comments:
Post a Comment